开云集团科技有限公司 - 智能制动系统领军者

本发明涉及车辆制动系统。更具体地讲,本发明涉及一种能够通过电动机和减速单元的操作来对车辆进行制动的电子机械制动系统。
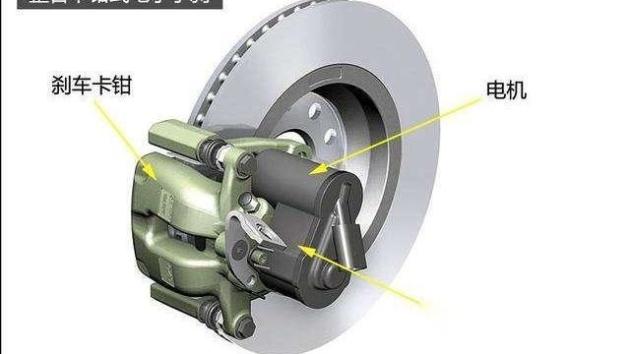
在车辆中安装制动系统以降低车辆的速度,使车辆停止或使车辆保持在停车状态。通常,作为制动系统,主要使用摩擦式制动系统。摩擦式制动系统通过使用摩擦力将动能转换成热能并且将热能释放到大气中以执行制动操作。根据摩擦式制动系统,制动块被向着与车轮一起旋转的制动盘的两侧液压,从而使车辆制动。然而,根据现有技术的液压制动系统,在制动操作时制动块被液压强烈推向制动盘,因此液压制动系统需要复杂的结构,该复杂的结构包括由提高踏板力的增压器操作以产生液压力的主缸、延伸到轮缸的液压管线、以及控制和支持上述部件的各种装置。由于复杂的结构和对液压的使用,液压制动系统表现出在制动性能的可靠性和稳定性方面存在限制。出于这个原因,能够简化结构并且提高制动性能的可靠性的电子机械制动(EMB) 系统已被广泛使用。根据EMB系统,当进行制动操作时接收电子踏板信息的电子控制单元(ECU)驱动电机以产生轴向驱动力,从而通过连接到电机的减速单元来使活塞沿轴向运动。因此,制动块被压向制动盘,从而执行制动操作。作为EMB系统的主致动器的电机可以包括BLAC式电机或BLDC式电机。另外,为了控制电机,可以使用包括位置控制器(或功率控制器)、速度控制器和电流控制器的级联控制器。如果当EMB系统的电机未运行时运行命令被产生,则由于初始惯性和粘滑而导致出现运行延迟。在此状态下,如果电机运行,则由于运行延迟引起的大误差使得速度控制器输出大的命令信号值,从而会发生电机超调。如果发生电机超调,则电机会旋转得比电机控制器的命令速度快,从而速度控制器将反向命令输出到电机(即,沿着使电机的运行停止的方向)以降低电机速度。通常,考虑到控制过程,上述过程被认为是正确的控制行为。然而,考虑到EMB系统,由于电机刚开始运行,因此制动块不会与制动盘接触,从而不会产生制动力。因此,即使发生(比命令速度大的)速度误差,电机也应该被以近似最大的速度驱动。具体而言,应该绝对禁止电机减速。
因此,本发明的一个方面提供了一种EMB系统的控制方法,在该方法中,即使在 EMB系统中电机运行的早期阶段中出现速度误差(电机的实际速度 电机的命令速度),电机减速也被限制,直到产生制动力为止,从而提高了制动响应性。
本发明的其它方面和/或优点将被在以下描述中部分地阐述,并且将根据该描述而部分地变得清楚或者可通过对本发明的实践而被部分地了解。通过提供一种用于控制包括级联控制器的电子机械制动系统的方法来实现本发明的前述和/或其它方面,在该级联控制器中,位置控制器、速度控制器和电流控制器被集成以控制电机,该方法包括以下步骤确定在电机运行的早期阶段中该电机的实际速度是否超过该电机的命令速度;以及如果在该电机运行的早期阶段中该电机的实际速度超过该电机的命令速度,则对该开云科技有限公司电机的减速进行限制,直到产生制动力为止。根据本发明,对该电机的减速进行限制的步骤包括以下步骤将所述速度控制器的输出命令设置为零。根据本发明,对该电机的减速进行限制的步骤包括以下步骤控制所述电流控制器的输入命令,从而对该电机施加适合于防止该电机加速的预定电流。根据本发明,对该电机的减速进行限制的步骤包括以下步骤控制所述电流控制器的输入命令,从而对该电机施加与该电机的位置误差成比例的预定电流。如上所述,根据本发明,即使在EMB系统中电机运行的早期阶段中出现速度误差 (电机的实际速度 电机的命令速度),电机减速也被限制,直到产生制动力为止,从而提高了制动响应性。
本发明的这些和/或其它方面和优点将根据结合附图对实施方式的以下描述而变得清楚和更易于理解,其中图1是示出了根据本发明的一个实施方式的用于控制EMB系统的电机的级联控制器的框图;以及图2是用于说明应用了根据本发明的一个实施方式的对EMB系统的控制方法的速度误差发生时刻的图。
具体实施例方式现在将详细描述其示例在附图中示出的本发明的实施方式,其中相同的标号指代相同的元件。以下通过参照附图来对实施方式进行描述以说明本发明。图1是示出了根据本发明的一个实施方式的用于控制EMB系统的电机的级联控制器的框图。如图1所示,用于控制EMB系统的电机40的级联控制器包括位置控制器10、速度控制器20、电流控制器30、电机电流检测器50、电机速度检测器60和电机位置检测器70。位置控制器10接收来自电子控制单元(E⑶,未示出)的电机位置控制命令Pu和由电机位置检测器70测得的电机位置值Rn,以产生位置控制器10的输出命令cou。位置控制器10与速度控制器20串联连接,从而位置控制器10的输出命令可以作为用于速度控制器20的电机速度控制命令《U。速度控制器20接收来自位置控制器10的电机速度控制命令ω u和由电机速度检测器60测得的电机的角速度ωπι,以生成速度控制器的输出命令Iu。速度控制器20与电流控制器30串联连接,从而速度控制器20的输出命令Iu可以作为用于电流控制器30的电机电流控制命令Iu。电流控制器30接收来自速度控制器20的电机电流控制命令Iu、由电流检测器50 测得的电机的电流值Im、以及反向速度命令校正值,以生成电流控制器30的输出命令。术语“反向速度命令校正值”指被加到速度控制器20的输出命令或电流控制器30 的输入命令或者从速度控制器20的输出命令或电流控制器30的输入命令减去的值,以便即使在EMB系统中在电机运行的早期阶段中出现速度误差(电机的实际速度 电机的命令速度),也限制电机减速,直到产生制动力为止。将在下面更详细地描述术语“反向速度命令校正值”。电机40用作EMB系统连同减速单元(未示出)的主致动器,并且BLAC式电机或 BLDC式电机被主要用作电机40。电机电流检测器50测量电机40的电流值Im,并且将该电流值加提供给电流控制器30。电机速度检测器60测量电机40的角速度ωπι,并且将该角速度com提供给速度控制器20。电机位置检测器70测量电机40的位置值Rn,并且将该位置值Rn提供给位置控制器10。图2是用于说明应用了根据本发明的一个实施方式的对EMB系统的控制方法的速度误差发生时刻的图。如上所述,由于在EMB系统运行的早期阶段中电机40刚开始运行,因此制动块不与制动盘接触,从而不产生制动力。因此,为了提高制动响应性,即使出现速度误差(电机的实际速度 电机的命令速度),也应该对电机减速进行限制。因此,当因为在EMB系统的电机运行的早期阶段中电机40的实际速度超过电机 40的命令速度,所以速度控制器20开始减小电机40的速度时,即,当速度命令(或参考速度)的符号与对应于图2的“A”的速度误差(参考速度-电机的实际速度)的符号相反时, 对电机减速进行限制以提高EMB系统的制动响应性。在图2中,当计算速度误差(参考速度-电机的实际速度)时,通过考虑相位延迟,替代由电机速度检测器60测得的电机速度, 而将通过对测得的电机速度进行滤波所获得的电机速度用作“电机的实际速度”。根据本发明,当在EMB系统的电机运行的早期阶段中,速度命令(或参考速度)的符号与对应于图2的“A”的速度误差(参考速度-电机的实际速度)的符号相反时,通过以下三种方案对电机减速进行限制①将速度控制器20的输出命令Iu设置为零,即,反向速度命令校正值被输入作为输出命令Iu (Iu-Iu = 0),②控制电流控制器30的输入命令,使得可以向电机40施加适合于防止电机40加速的预定电流(在此情况下,电机的减速更缓慢地进行),③控制电流控制器30的输入命令,使得可以向电机40施加与位置误差成比例的电流。当在电机运行的早期阶段中速度命令(或参考速度)的符号与速度误差(参考速度-电机的实际速度)的符号相反时,执行本发明的用于对电机减速进行限制的控制方法, 直到产生EMB系统的制动力为止。根据本发明的用于EMB系统的控制方法,即使在EMB系统中电机运行的早期阶段中出现速度误差(电机的实际速度电机的命令速度),电机减速也被限制,直到产生制动力为止,从而提高了制动开云科技有限公司响应性。 尽管已经示出并描述了本发明的几个实施方式,但是本领域技术人员应当理解, 在不脱离其范围由权利要求及其等同物所限定的本发明的原理和精神的情况下,可对这些实施方式进行改变。
1.一种用于控制包括级联控制器的电子机械制动系统的方法,在该级联控制器中,位置控制器、速度控制器和电流控制器被集成以控制电机,该方法包括以下步骤确定在电机运行的早期阶段中该电机的实际速度是否超过该电机的命令速度;以及如果在该电机运行的早期阶段中该电机的实际速度超过该电机的命令速度,则对该电机的减速进行限制,直到产生制动力为止。
2.如权利要求1所述的方法,其中,对该电机的减速进行限制的步骤包括以下步骤将所述速度控制器的输出命令设置为零。
3.如权利要求1所述的方法,其中,对该电机的减速进行限制的步骤包括以下步骤控制所述电流控制器的输入命令,使得对该电机施加适合于防止该电机加速的预定电流。
4.如权利要求1所述的方法,其中,对该电机的减速进行限制的步骤包括以下步骤 控制所述电流控制器的输入命令,使得对该电机施加与该电机的位置误差成比例的预定电流。
披露了一种用于控制包括级联控制器的电子机械制动系统的方法,在该级联控制器中,位置控制器、速度控制器和电流控制器被集成以控制电机。该方法包括以下步骤确定在电机运行的早期阶段中该电机的实际速度是否超过该电机的命令速度;以及如果在该电机运行的早期阶段中该电机的实际速度超过该电机的命令速度,则对该电机的减速进行限制,直到产生制动力为止。即使在EMB系统中在电机运行的早期阶段中出现速度误差,即电机的实际速度>电机的命令速度,电机减速也被限制,直到产生制动力为止,从而提高了制动响应性。
1.智能驾驶技术研究 2.智能汽车人机交互研究 3.自动驾驶预期功能安全及可靠性 4.驾驶功能与车辆动力学数据融合 5.驾驶场景大数据分析技术 6.车辆性能研究
1.新能源汽车电驱动技术 2.轮毂电机驱动与控制 3.开关磁阻电机驱动系统控制 4.智能电动汽车
1.内燃机节能及排放控制技术 2.汽车节能与新能源汽车技术 3. 车辆现代设计理论与方法